Unit 12: Character Rigging
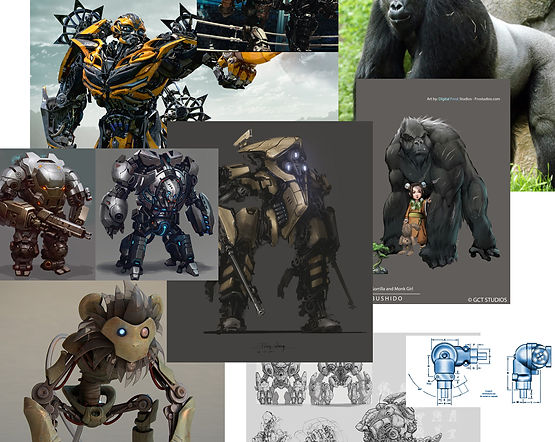


For this unit my initial idea to create a gorilla like mech, I would to try to rig something that moves in four limbs (quadruped) and capture the kind of movements for my mech. I first have to come up with the design of the robot so I can work around how it different components will move. different influences of mine were from movies like transformers (2012) and different concept arts of mech and gorillas.
what I took from the movies is example of the overall look of the mech, also giving examples of different mechanical parts the make my mech more robotic and interesting, there are also ideas on how to texture my mech, example is how the metal and paint is damaged
while I took different ideas such's as the giant robot hands from a mech concept art and mixed it with the features of the gorilla from the reference images I have of the gorilla.
For this unit my initial idea to create a gorilla like mech, I would to try to rig something that moves in four limbs (quadruped) and capture the kind of movements for my mech. I first have to come up with the design of the robot so I can work around how it different components will move. different influences of mine were from movies like transformers (2012) and different concept arts of mech and gorillas, what I took from the movies is example of the overall look of the mech, also giving examples of different mechanical parts the make
my mech more robotic and interesting, also ideas on how to texture my mech while I took different ideas such's as the giant robot hands from a mech concept art and mixed it with the features of the gorilla from the reference images I have of the gorilla.
This is a particle experiment where I have created a simple robot arm. I have added a rigging joint and an IK handle setup up in order to move the arm.
An IK chain is a tool used to move a joint hierarchy starting from the last joint, unlike FK chains, (forward kinematics) where move over the joints starts from the root of the hierarchy, although FK is more accurate to real life body mechanics, IK chains are able to place the end joint in certain position accurately and has fluid movement throughout the whole arm, both are useful for different situations.
I then added different controllers in order to move the IK handle, and also controllers on the shoulder and elbow.
Robot Arm Experiment
This is my modeled mesh of my Mech, To create this with simple cylinder primitive and box modeling for them, I as I said when making the design, I wanted to make it look more like a gorilla, I created a base mesh of a gorilla using reference to start of my mesh, the extrude different parts to make the mech aspect what I could improved was the different mechanical parts for the joints,
I could of replicated more of hinge like parts so the can move more without having awkward deformation or mesh pats collided through each over, I like the overall look the Mech I will decided what rigging setup I will uses and what will look best
I have created a few different blend shape, a Blen shape is an animation tool where you manipulate the verts on a mesh without changing to created different positions or expressions for it, before Maya 2016 in order to create a blend shape you would have to create a copy of the mesh and edit it like so,
this could be tedious when creating 100 of different blend shapes for a character.
Now you can just edit the same mesh and create blend shape more easily making this a powerful tool to things like deformation tweaking and facial expression, I fill that the blend shape give my mesh some character and bring some life into the mesh.
One problem I had with Blend shapes was that one you create them for a mesh, you cannot really edit that mesh (in terms of modeling any further) .
Blend shapes
FK/IK research
I have different rigging setups and I have found that, many animators in the industry prefer to have bot FK and IK, so I researched how I could do this.
What I have found is a video tutorial on lynda's youtube channel where they teach how to make a an attribute which switched your FK and IK controls
The way you achieve this is by creating a blend color node I the hyper shade and plugging the rotation of the FK and IK into the RGB attributes and then plugin the output into the bound skeleton.
one problem with is you can really blend them to gather, its more like a switch, also,
I made the mistake of not naming joint, this made the process extremely time consuming. in future being more organized will gave me a lot of time.
This is an example of the different kind of constraints I used, this one in particular is an aim constraint it is used to create a control more eyeball to follow.
other constrained I have used, are orient constraints, controls the rotation of the object, and point constraints which constraint the translate value off the an on object.
I will be using multiple and a multiple and a variety of these constraints .
For FK I will be using orient constraints, for the IK handle I will be using a point constraint for its controlling. one problem with using constraints is that it can change the pivot of the object and messing up the position of your object.
one way to combat this is to freeze transforms of the controller and to check the maintain offset before constraining.
I have researched on other method of using a combination of FK IK setups, I have found another video tutorial creating an IK spline joint hierarchy that is been controlled by an FK joint. then he did this by first creating a spinal joint chain that has a about 8 joint to curve that natural curvature, he then added an IK spline handle with controllers. after he created 3 joint fk chain that the IK is parented to. giving a natural IK movements using FK controllers
that is useful when rigging a spine as it give that natural spinal curvature. I will be using this in my own Mech, the only thing is I hope that the natural curvature does not break the robotic look of my mech
First Rig Test
I then added skin weights to deform it when it moved, this did not go well with the look lot the mesh I may need to rethink the skinning process. I also think I want to research on how to include Forward kinematics as well as IK into my Mech.
This is my First test of my new rig, the way I created this by placing the first placing the joints of the of the skeleton, I then duplicated limbs joint for the FK/IK limbs.
By I then created one FK control rig and one IK control rig. after I used a blend color node in order to create a attribute that can switch between the two control rigs and connecting the output values to the original skeleton.
I have also used an spline IK hand that’s driven by an FK control setup, this makes it so my rig is able to move the spine that has realistic spine curvature.
What I think I could improved was to initially label all my joints and keep the scene more organized because it make the FKIK process much faster and have less mistaken like parenting object to the wrong joints.

This is my updated model and textured gorilla mech, I UV mapped the model and textured it using Photoshop, I have gone back to the modeling phase in order to change some aspects such as the joints and area where a lot of the mesh start clipping through each other. initially I thought I would smooth bind the model, this did not work because it does not suit the look of a robot, instead I parented the mesh the joints which gave me a better result. examples of aspects I remodeled where thing like the elbow and knee joints, replacing the original mesh with simple shapes like spheres and cogs, this make the mesh function so It doesn't clip through each other, while making sure it still looks robotic. when it comes to the texturing , I think that the specular map went well as it enhanced the damaged mentally look I was going for. I think that I could improved the UV mapping, making sure that the texture isn't stretched or compressed
This is my final result for the rigging project.
For this project my initial idea was to create a mechanical quadruped, specifically a gorilla/ primate like robot. I am to have the robot rigged so it can walk on all floors like gorillas do. To achieve this my initial Idea was to have a simple IK system that controlled the limbs, so I can make it create basic walk.
I did some research on how my model should, I looked at different designs of robot concept which inspired the overall look of the different body parts on my model. I took different aspects from movies such as transformer (2012) aspects such as subtle details like fans and metal cogs, things you usually see on robots, this influenced the overall look
I also looked at how gorilla actually look. I used reference photos to create the base shape of the model, giving me a basic body which I could add all the robotic detail to.
while researching different techniques to rig my robot, I found out that professional rigs usually have a combination of both FK and IK handle, I wanted my rig to have this elaborate set up. I found a video tutorial on how to create the FKIK setup through a blend color node in Maya.
with this research I have furthered my knowledge and understanding of rigging and can start thinking about more advance rigs in the future, also I feel without different influences from concept art and movies, the model may have looked too basic and generic, because of this, I feel that my research was successful
I started by modelling a basic gorilla body, using refines of gorilla to do so, I than broke the body up into pieces and different aspect like bevels and holes to create the robotic detail. I the create a joint hierarchy that matched the body, and added my FKIK system that I researched about, I also added a IK spline system, which simulated more believable spinal movements. A problem I had during the rigging phase was the fact that my hierarchy's and controls were unlabeled, this made things difficult while I was trying to create the FKIK system. I had to go back and name everything within the scene, this was very time consuming, I could of avoided this if I was more organized and labeled everything before hand.
at this point in the project I has to go back to the modeling phase and change different aspects of the body, reasons being that some of the parts of the model where clipping through each other. I had to change different parts like the joints of the model to fix it, showing that I could of improved the planning and the design of my model, thinking more about functionality of the design.
I then UV mapped and textured the model, adding a displacement map to enhance the metal look. one problem I had was the fact that some of my UV were stretched or compressed, this my the textured distorted on the model. I could of fixed this by changing the UV's, or by using different texturing techniques like Ptex or Procedural, one aspect I liked were the specular maps I created, it gave my model a nice damaged metal look which added believability that it a robot.
For the final outcome I created a video demonstration of my rig and how it works and a short video of the model that has been camera tracked, to do this I took a video with a paper that had tracking points on it to make sure tracing goes smoothly, I then used syntheyes to track the video and export it into maya. this is where I placed the model with its animation, then rendered out for post compositing in after effects. I could of improved the quality of the animation and how the gorilla is composited within the video. I could of done this by changing the lighting and shading to add realism. I could of done this within maya and render out, or within after effects using render passes.
I feel that had successfully created, what I set out to do, but I think I could improved my final outcome, in terms of quality of work and the efficiency of the process. example of this was the FKIK rig, I was able to create a rig with both FK and IK but the process could have been a lot more efficient and a lot less time consuming if I did I was more organized with the scene.
My strength in this project was that I was able to strive and accomplish more than I initially set out to do, example being the more complicated rig and the final video tracked animation. My weakness in this project was project management and design development. I think If I organized the project and thought more carefully about aspect like how the joints and body will move, the process of creating would have been much better in terms of efficiently and quality.